Astrometria
Astrometria é o ramo da astronomia relacionado à medida precisa da
posição e movimento dos corpos celestes.
A astrometria inicia com a composição do primeiro catálogo de estrelas.
 Hiparco de Nicéia (c.190-c.120 a.C.), considerado o maior astrônomo da era pré-cristã,
construiu um
observatório na ilha de Rodes, onde fez observações durante o
período de
147 a 127 a.C. Como resultado,
ele compilou um catálogo com a posição no
céu e
a magnitude de 850 estrelas. A magnitude, que especificava o brilho da
estrela, era dividida em seis categorias, de 1 a 6, sendo 1 a mais
brilhante, e 6 a mais fraca visível a olho nu. Hiparco deduziu corretamente
a direção dos pólos celestes, e até mesmo a
precessão, que é a
variação da
direção do eixo de rotação da Terra devido
à influência
gravitacional da Lua
e do Sol, que leva cerca de 26 000 anos
para completar um ciclo.
Para deduzir a precessão, ele comparou
as posições de várias estrelas
com aquelas catalogadas por Timocharis de Alexandria
(c.320-c.260 a.C.) e Aristyllus de Alexandria
150 anos antes (cerca de 283 a.C. 260 a.C.).
Hiparco de Nicéia (c.190-c.120 a.C.), considerado o maior astrônomo da era pré-cristã,
construiu um
observatório na ilha de Rodes, onde fez observações durante o
período de
147 a 127 a.C. Como resultado,
ele compilou um catálogo com a posição no
céu e
a magnitude de 850 estrelas. A magnitude, que especificava o brilho da
estrela, era dividida em seis categorias, de 1 a 6, sendo 1 a mais
brilhante, e 6 a mais fraca visível a olho nu. Hiparco deduziu corretamente
a direção dos pólos celestes, e até mesmo a
precessão, que é a
variação da
direção do eixo de rotação da Terra devido
à influência
gravitacional da Lua
e do Sol, que leva cerca de 26 000 anos
para completar um ciclo.
Para deduzir a precessão, ele comparou
as posições de várias estrelas
com aquelas catalogadas por Timocharis de Alexandria
(c.320-c.260 a.C.) e Aristyllus de Alexandria
150 anos antes (cerca de 283 a.C. 260 a.C.).
A astrometria teve grande
desenvolvimento nos países árabes.
Em 850, Alfraganus (Ahmad ibn Muhammad ibn Kathir al-Farghani) escreveu Kitab fi Jawani (Um compendium da ciência das estrelas), com valores revisados da obliqüidade da eclíptica,
do movimento de precessão dos apogeus
do Sol e da Lua, e da circunferência da Terra.
Albatenius (Abu Abdallah Muhammad ibn Jabir ibn Sinan ar-Raqqi al-Harrani as-Sabi al-Batani) (853-929),
na Síria, calculou os tempos
de lua nova e a duração do ano solar (365 d 5 h 46 m 24s) e sideral, e
a precessão dos equinócios (54,5" por ano).
Seu trabalho mais importante são as tabelas al-Zij al-Sabi,
traduzidas para o latim por Plato Tiburtinus como De Motu Stellarum.
No século X, Azophi (Abd al-Rahman al-Sufi) (903-986), da Pérsia, realizou observações das estrelas,
determinando suas posições, magnitudes, cores e fez desenhos de cada constelação, em seu
Livro de Estrelas Fixas.
Neste livro aparecem pela primeira vez as galáxias (pequenas nuvens) Andromeda e a Grande Nuvem de Magalhães.
O egípcio
Ibn Yunus
(Abu al-Hasan 'Ali abi Sa'id 'Abd al-Rahman ibn Ahmad ibn Yunus al-Sadafi al-Misri) (c. 950-1009)
observou mais de 10 000 vezes a posição do Sol durante muitos anos, usando um astrolábio
de 1,4 m de diâmetro, no Cairo, Egito.
Publicou as tabelas astronômicas al-Zij al-Kabir al-Hakimi, por volta do ano 1000.
Suas observações dos eclipses foram utilizadas séculos mais tarde pelo
astrônomo canadense-americano
Simon Newcomb
(1835-1909),
diretor do The Nautical Almanac Office do United States Naval Observatory,
para investigar o movimento da Lua. Outras observações de Ibn Yunus foram utilizadas pelo matemático
e astrônomo francês
Pierre-Simon, marquês de Laplace, (1749-1827),
no Obliqüidade da Eclíptica e Inequalidades de Júpiter e Saturno.
O iraniano Abu-Mahmud al-Khujandi
(c.940-1000), de suas observações do Sol com um sextante,
calculou a obliqüidade da eclípica em 23°32'19" (23,53°), comparado com a estimativa atual
da obliqüidade no século X de 23º35'.
No século XV, o príncipe e astrônomo persa
Ulugh Beg
(Mirza Mohammad Taregh bin Shahrokh)
(c.1393-1449)
construiu um sextante com 36 m de raio com o qual
compilou o Zij-i-Sultani, onde catalogou 1019 estrelas.
No século XVI, o otomano
Taqi al-Din
(Taqi al-Din Muhammad ibn Ma'ruf al-Shami al-Asadi) (1526-1585)
construiu o
observatório de Istambul e inventou um relógio mecânico, com molas, com o qual
mediu com precisão a ascensão reta das estrelas, revisando o
Zij-i-Sultani de Ulugh Beg.
 A primeira estimativa correta do valor da Unidade Astronômica ocorreu
entre 5 de setembro e 1o de outubro de 1672,
quando o planeta Marte, com magnitude=-2,3, estava
muito próximo da
estrela brilhante ψ2 Aquarii
de magnitude=4,
e próximo da oposição de Marte, portanto
próximo do perigeu.
A primeira estimativa correta do valor da Unidade Astronômica ocorreu
entre 5 de setembro e 1o de outubro de 1672,
quando o planeta Marte, com magnitude=-2,3, estava
muito próximo da
estrela brilhante ψ2 Aquarii
de magnitude=4,
e próximo da oposição de Marte, portanto
próximo do perigeu.
Com as observações simultâneas de
Jean Richer (1630-1696) em Cayenne,
na Guiana Francesa,
Jean Picard (1620-1682) e Olaus Rømer (1644-1710) em Paris,
Giovanni Domenico Cassini (1625-1712)
estimou a paralaxe de Marte como 15" entre Cayenne e Paris
(7200 km de distância, 25" total, 2RTerra)
e, considerando que Marte está a 1,52 UA do Sol, determinado por Johannes Kepler,
estimou o valor da UA como 140 milhões de km. O valor correto
é de 149,597870691 milhões de km.
Para comparação,
o olho humano só consegue detectar ângulos maiores que
cerca de 1'=60".
A primeira tentativa de medir a paralaxe das estrelas pelo astrônomo inglês
James Bradley (1693-1762) ocorreu em 1729,
e embora o movimento das estrelas fosse insignificante para seu telescópio, ele descobriu
a aberração da luz (1729, Philosophical Transactions of the Royal Society, XXXV, 637),
e a nutação do eixo da Terra (1748, Philosophical Transactions of the Royal Society, XLV, I),
após observar seu período completo, de 18,6 anos.
Seu catálogo de 3222 estrelas foi refinado em 1807 por
Friedrich
Wilhelm Bessel (1784-1846), o pai da astrometria moderna, medindo a
primeira
paralaxe estelar: 0,3" para a estrela binária
61 Cygni. Bessel recebeu o prêmio
Lalande
do Instituto da França por sua tabela de refração,
baseada nas observações de Bradley. Bessel foi o primeiro astrônomo a considerar que antes de poder usar uma medida,
ele precisava determinar todos os tipos de incertezas que pudessem afetar a medida. Ele também calculou
os movimentos próprios das estrelas observadas por Bradley.
Como a paralaxe das estrelas é pequena, somente 60 estrelas tiveram sua paralaxe medida
até o fim do século XIX. Somente com a automação das medidas de placas fotográficas, na década de 1960, foi possível
compilar com eficiência grandes catálogos.
As medidas das posições precisas das estrelas são feitas com instrumentos dedicados,
como o círculo meridiano, que se move somente sobre o meridiano local (linha passando pelos polos e pelo zênite) e
registra quando um astro cruza este meridiano,
o tubo zenital, que mede somente as estrelas que passam muito próximas do zênite do local,
e os astrolábios, que observam o meridiano próximo de uma altitude de 60°,
como o
astrolábio impessoal de Danjon, em honra do astrônomo francês André-Louis Danjon (1890-1967),
um telescópio horizontal
onde um prisma é montado com uma face em frente a objetiva do telescópio. Abaixo
do prisma existe um espelho formado por um prato com mercúrio líquido.
A imagem da estrela, e sua reflexão do espelho de mercúrio, são refletidas internamente no prisma
e coincidem no plano focal do telescópio quando a sua distância zenital é exatamente o meio ângulo
do prisma (30° para um prisma de 60°).
Nos anos 1980 os
CCDs (Charged Coupled Devices) substituíram as placas fotográficas
e reduziram as incertezas óticas para a faixa de alguns milisegundo de arco.
É importante notar que 1 mili-segundo de arco (msa) é equivalente ao tamanho angular de uma pessoa na
superfície da Lua vista da Terra.
Para atingir esta precisão, foi necessário corrigir pelo efeito de desvio da luz pelo Sol previsto pela relatividade geral, e que é de 1,7 segundos de arco na borda do Sol, e 4 mili-segundos de arco a 90° do Sol.
De 1989 a 1993, o
satélite da Agência Espacial Européia (ESA) Hipparcos
(High-Precision Parallax Collecting Satellite)
obteve astrometria em órbita,
escapando das distorções da atmosfera da Terra, medindo a posição, paralaxe e movimento próprio de
118 218 estrelas, com precisão de miliseguindos de arco. O catálogo Tycho incluiu dados de 1 058 332 estrelas,
com precisão de 20 a 30 msa. O catálogo Tycho 2, de 2000, soma 2 539 913 estrelas, e inclui 99% de
todas as estrelas mais brilhantes que magnitude 11.
Atualmente o catálogo do
US Naval Observatory, USNO-B1.0,
de todo o céu, mantém a posição, magnitude e movimento próprio
de mais de um bilhão de estrelas, até V=21. Durante os últimos 50 anos, 7435 placas Schmidt foram utilizadas
pra completá-lo, com precisão de 0,2 msa e 0,3 mag em cinco cores [David G. Monet et al. (2003, Astronomical Journal, 125, 984].
O Gaia-PS1-SDSS (GPS1) Proper Motion Catalog combina a astrometria do Gaia Data Release 1, Pan-STARRS 1, SDSS e 2MASS para calcular o movimento próprio de 350 milhões de fontes cobrindo 3/4 do céu até mr=20,
com incerteza sistemática menor que 0,3 msa/ano, e precisão típica de 1,5 a 2,0 msa/ano. A missão espacial Gaia (Global Astrometric Interferometer for Astrophysics) da European Space Agency, com 106 CCDs cobrindo 0,5×1 m, está em operações no ponto lagrangeano 2, a 1,5 milhões de km na direção antisol, desde 2014.
Em 25 de abril de 2018 será liberado o Data Release 2, com a paralaxe e movimento próprio de mais de 1 bilhão de estrelas.
A posição
de uma fonte astronômica no céu é uma de suas características mais importantes,
pela necessidade prática de distinguir de maneira inequívoca a fonte
e poder observá-la. A posição
de uma fonte é definida através de
coordenadas celestes. Estas coordenadas não levam em conta a
distância da estrela, somente sua posição aparente na esfera celeste.
O sistema equatorial,
por ser baseado em um plano de referência comum
e reconhecido para todos os observadores
na superfície da Terra,
o equador celeste,
é o mais utilizado para definir a posição de uma fonte.
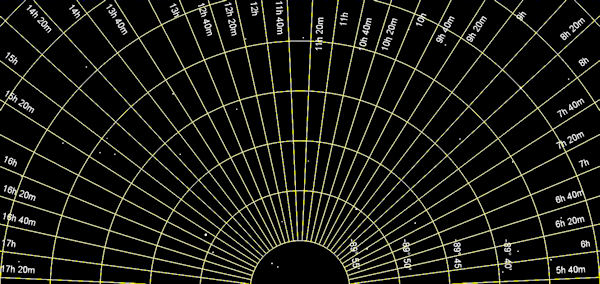
As coordenadas são ascensão reta (α), medida no equador
a partir do ponto vernal, isto é, do ponto que representa a
intersecção do equador celeste com a eclíptica,
e declinação (δ), medida perpendicular ao equador, no
meridiano do objeto.
Outros sistemas, também compartilhados por todos,
são o sistema de coordenadas Eclípticas (λ,ε)
e as coordenadas Galáticas (l,b).
As coordenadas eclípticas
(λ,ε)
tomam como referencia o plano da eclíptica, ou seja, o
plano orbital terrestre em torno do Sol. A latitude eclíptica (λ)
é o ângulo da direção
considerada em relação ao plano da eclíptica, enquanto que a longitude eclíptica
(ε) é o
ângulo medido ao longo da eclíptica, com origem no ponto vernal.
O sistema Galático toma como plano de referência o plano do disco da Via-Láctea,
nossa Galáxia, que corresponde à latitude Galática b=0°. A direção ao longo
desse plano que corresponde à longitude Galática l=0° é
a do centro da Galáxia.
Mas como obter as coordenadas de um objeto astronômico a partir de sua posição numa imagem?
A astrometria consiste na conversão de uma posição
em coordenadas planas projetadas (x,y) de uma imagem para
um sistema de coordenadas celestes.
Normalmente a astrometria é
feita simultaneamente para todos os pontos da imagem, através de equações de
transformação do tipo:
α= α0 + a(x-x0) + b(y-y0)+c
δ= δ0 + d(x-x0) + e(y-y0)+f
onde (α,δ)
são as coordenadas equatoriais de um ponto (x,y) numa imagem
e (α0,δ0) são
as coordenadas nominais correspondentes ao ponto de referência da imagem
(x0,y0).
Se o apontamento do telescópio fosse perfeito, as coordenadas do ponto de
referência da imagem corresponderiam exatamente às coordenadas
(α0,δ0).
Nesse caso teríamos nas equações acima para α e δ, c=f=0.
Em geral, o apontamento inicial é
feito colocando o telescópio no zênite e informando ao sistema de controle do telescópio
as coordenadas geográficas (latitude λ e longitude φ) do local
e a data e hora local da observação.
Com essas informações, é possível determinar as coordenadas equatoriais
que correspondem ao
zênite naquele instante (αz=tempo sideral local;
δz=latitude do local), e o telescópio pode ser apontado para qualquer
outra coordenada equatorial. Como o apontamento tem falhas, faz-se
necessário incluir os termos c e f de correção na astrometria.
Os demais coeficientes (a, b, d e e) também são
teoricamente conhecidos, pela escala de placa do telescópio,
mas sempre há necessidade de correções. Por exemplo, seja um telescópio
cuja câmara CCD está orientada no plano focal de tal forma que a direção
de y crescente
corresponde ao norte e a direção de x crescente ao leste. Nesse caso teríamos
onde
ds/dp é a escala da imagem, que em geral é expressa em "/pix ou "/mm.
O termo cos(δ) na expressão do coeficiente a
se deve ao fato de que a ascensão reta (α)
varia ao longo de um paralelo celeste, que só corresponde a um arco de
grande círculo no caso do equador celeste (δ=0°).
Nos outros casos, a transformação
do arco sobre a imagem em um arco em α exige o termo de correção:
quanto maior a declinação, menor o arco de círculo sobre o qual
α varia e,
portanto, mais rápida a variação desta coordenada para uma mesma variação em x.
Assim como no caso da centragem (apontamento) do telescópio, certa flexibilidade é necessária para acomodar variações na orientação do CCD com relação aos pontos cardeais, até porque efeitos de deformação gravitacional sobre os componentes ópticos do detector podem induzir variações nos coeficientes de conversão astrométrica em função da direção de apontamento.
Por
vezes, a conversão de coordenadas
retangulares (x,y) em coordenadas equatoriais (α,δ)
é afetada por deformações da imagem no
plano focal. Sabemos que nem sempre a superfície onde se forma a imagem de um telescópio,
e onde colocamos o detector, é plana, havendo por vezes efeitos de curvatura.
Essas curvaturas em geral afetam mais as posições de objetos longe do centro da
imagem.
Assim,
termos quadráticos em x e y podem ser necessários e precisam ser
determinados empiricamente.
Necessariamente
a aplicação das transformações dadas acima, ou de outras que incluam
termos quadráticos
e cruzados, exige que os coeficientes sejam bem determinados, caso a caso. Isso,
em geral, é feito pelo uso de estrelas de referência astrométrica nos campos
imageados. Estas estrelas
de referência têm suas coordenadas equatoriais bem conhecidas. As
medidas da suas posições (xi,yi) na imagem, portanto,
permitem que sejam
determinados empiricamente os coeficientes. Em geral usa-se um conjunto de
estrelas de referência e determinam-se os coeficientes por ajuste
por mínimos quadrados.
Uma vez obtidas as coordenadas equatoriais dos pontos da imagem,
a conversão para o sistema de
coordenadas eclípticas ou Galáticas se dá por meio de transformações matemáticas
conhecidas, já que essas conversões equivalem a uma mudança de plano e eixos de
referência, que são equivalentes a aplicar rotações de um sistema para chegar ao outro.
Para
finalizar, há ainda que se distinguir astrometria relativa (a um dado sistema)
de astrometria absoluta. O processo descrito acima é o de obtenção de valores
de coordenadas com relação a um conjunto de estrelas cujas posições são
conhecidas em um dado sistema, em geral o sistema equatorial de coordenadas. O
problema com esse sistema é que nem o plano do equador, nem a direção do ponto
vernal, que lhes servem de referência, constituem um referencial inercial,
já que o equador e o eixo de rotação da Terra variam de orientação no espaço,
pois a Terra sofre perturbações gravitacionais dos outros objetos do
Sistema Solar, em especial do Sol e da Lua. Essas perturbações dão origem
aos efeitos de
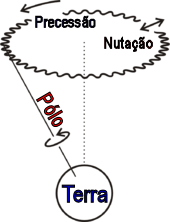 precessão (período=26 mil anos, amplitude=2×23,5°)
e nutação do eixo
(período=18,6 anos, amplitude=9,2 segundos de arco).
Esses efeitos podem ser descritos
por modelos de dinâmica gravitacional, mas ainda há termos de deslocamento
dos pólos celestes que não são bem descritos pelos modelos,
já que envolvem os campos gravitacionais de
vários corpos não esféricos. Assim, o sistema equatorial
sofre constante degradação,
precisando ser continuamente redefinido. É importante
notar que não faz sentido falar de coordenadas equatoriais sem
especificar a que equinócio (ou seja, onde estava o
ponto vernal) elas se referem, que também muda com o tempo.
precessão (período=26 mil anos, amplitude=2×23,5°)
e nutação do eixo
(período=18,6 anos, amplitude=9,2 segundos de arco).
Esses efeitos podem ser descritos
por modelos de dinâmica gravitacional, mas ainda há termos de deslocamento
dos pólos celestes que não são bem descritos pelos modelos,
já que envolvem os campos gravitacionais de
vários corpos não esféricos. Assim, o sistema equatorial
sofre constante degradação,
precisando ser continuamente redefinido. É importante
notar que não faz sentido falar de coordenadas equatoriais sem
especificar a que equinócio (ou seja, onde estava o
ponto vernal) elas se referem, que também muda com o tempo.
Além disso, a própria órbita da Terra em torno do Sol é perturbada
em função das interações
gravitacionais interplanetárias. Tanto o plano da órbita quanto sua
excentricidade sofrem perturbações. E novamente, essas são apenas em parte
modeladas com precisão.
Assim,
o ponto vernal, que é uma das direções de coincidência entre o plano equatorial
e o plano orbital, também varia, mesmo que o plano equatorial fosse fixo.
Essa variação
do plano orbital então também exige que o sistema de coordenadas eclípticas
seja descartado como um sistema inercial, posto que está sempre sofrendo
variações.
E para
finalizar, as estrelas sofrem de movimentos próprios, causados pela aceleração
induzida pelo potencial gravitacional dentro da Galáxia. Assim sendo,
qualquer sistema de coordenadas baseado no uso de um conjunto de estrelas
de referência,
também é não inercial e sofre de degradação com o passar do tempo.
A definição de um sistema inercial de coordenadas,
para o qual possamos atribuir um
caráter de sistema em repouso com relação à complicada dinâmica dos objetos
locais do Sistema Solar e da Galáxia, é a de um sistema baseado em fontes
distantes, quasares e rádio-fontes. Estes estão entre os objetos mais
distantes que conhecemos no Universo.
Suas posições relativas são totalmente desvinculadas
da dinâmica interna do Sistema Solar e da Galáxia. Assim um
sistema de coordenadas baseado nesses objetos como referência pode ser tido
como absoluto, ou seja, não sofre uma degradação ao longo do tempo.
Desde 2010 a União Astronômica Internacional
recomenda o International Celestial Reference Frame 2
(ICRF2, ver http://rorf.usno.navy.mil/ICRF2/), baseado
em medidas de Very Long Baseline Interferometry (VLBI)
de 323 radio fontes distantes como sistema de coordenadas de referência
mais confiável, atingindo uma precisão de 0,02 milissegundos de arco.
 Um dos fatores que precisamos levar em contas nas observações é
a refração atmosférica. Seja z a distância zenital de um objeto
celeste. Partindo da Lei de Refração
Um dos fatores que precisamos levar em contas nas observações é
a refração atmosférica. Seja z a distância zenital de um objeto
celeste. Partindo da Lei de Refração
n•sen(z)=n'•sen(z')
onde n' é o índice de refração
da atmosfera,
n=1 o índice no vácuo,
z' é a distância zenital aparente,
a refração média, R=z-z',
é dada por
R=A tan z' + B tan3 z'
onde A=58,16" e B=-0,067"
são valores médios para 10 C e 760 mm de Hg de pressão, por exemplo.
O Astronomical Almanac
propõe A=16,27" P/T,
para pressão em millibars e T em K.
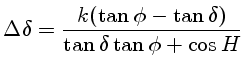
A correção na ascensão reta e declinação, para um astro com
ângulo horário H em um local de latitude Φ é dada por
onde aproximamos k=A e B=0.
Segundo Alexei V. Filippenko (1982, Publications of the Astronomical
Society of the Pacific, 94, 715),
ao nível do mar (P=760mm Hg, T=15 C), o índice de refração do ar é dado por:
[n(λ)-1]×106=64,328+29498,1/[146-(1/λ)2]+255,4/[41-(1/λ)2]
onde λ é o comprimento de onda no vácuo em microns.
Para diferentes temperaturas e pressões,
[n(λ)-1](T,P)=
[n(λ)-1](15,760)P[1+(1,049-0,0157T)10-6P}/[720,883(1+0,003661T)]
Para corrigir este índice pela quantidade de vapor d'água, precisamos
multiplicar a expressão acima por
(0,0624-0,000680/l2)/(1+0,003661T)f,
onde f é a pressão de vapor de água em mm de Hg.
Para uma altitude típica dos observatórios de 2 km e uma latitude de ±30°, as condições médias são P=600mm Hg, T=7 C e f=8mm Hg. Substituindo nas expressões acima, pode-se calcular a refração em segundos de arco num comprimento de onda λ relativa à refração observada em 5000Å, para um astro de distância zenital z, através de:
R(λ)-R(5000Å)=206265[n(λ)-n(5000Å)]tan(z).
Por exemplo, para uma distância zenital z=45°→
sec(z)=1,41, R(3500Å)-R(7000Å)=1,18-(-0,52)=1,70 segundos de arco!
Isto significa que a imagem do objeto no azul, observado a esta distância zenital, vai estar deslocada ao longo do ângulo paraláctico (perpendicular ao horizonte) por 1,7 segundos de arco, da imagem no vermelho.
 O ângulo paralático, η de um objeto é o ângulo entre o polo e o zênite,
medido no objeto. Não confunda com a paralaxe.
Como o ângulo de posição é medido a partir do polo, um ângulo de
posição igual ao ângulo paralático é perpendicular ao horizonte.
O ângulo paralático pode ser calculado de:
O ângulo paralático, η de um objeto é o ângulo entre o polo e o zênite,
medido no objeto. Não confunda com a paralaxe.
Como o ângulo de posição é medido a partir do polo, um ângulo de
posição igual ao ângulo paralático é perpendicular ao horizonte.
O ângulo paralático pode ser calculado de:
sen(η) = sen(A)×cos(φ)/cos(δ)
cos(η) = [sen(φ) - sen(δ)×cos(z)]/[cos(δ)×sen(z)]
cos(η) = [sen(φ)×sen(z) - cos(φ)×cos(z)×cos(A)]/cos(δ)
onde φ é a latitude do observador, δ a declinação do objeto, z a distância zenital (altitude = 90°-z),
e A o azimute do objeto.
δ-δ'= k tan z' cos η
α-α'= k tan z' sec δ' sen η
É muito importante colocar a fenda de um espectrógrafo no ângulo paralático para que o espectro no azul e no vermelho caiam dentro da fenda. Como o instrumento vai girar junto com o telescópio, é necessário estimar o ângulo paralático do meio
da exposição antes de iniciar a observação. Nem todos os espectrógrafos estão automatizados para permitirem a mudança da posição da fenda para cada objeto, o que pode introduzir uma perda de luz significativa e muitos problemas na calibração por fluxo,
já que a perda para a estrela de comparação não é similar à perda para o objeto.

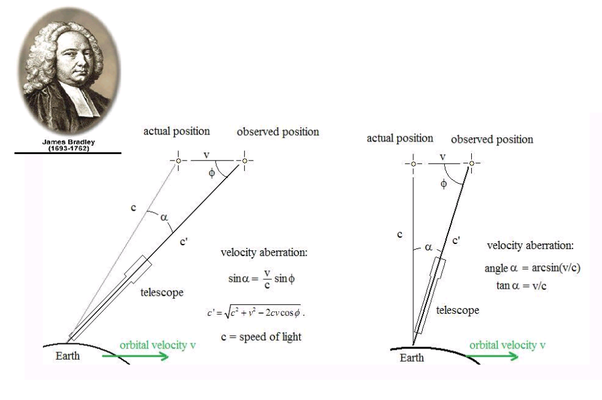
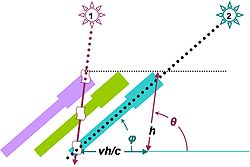 A luz da fonte 1 parecerá ter se originado em 2, pelo telescópio ter se movimentado
devido à rotação e/ou movimento orbital da Terra
(Fonte: Wikipedia)
A luz da fonte 1 parecerá ter se originado em 2, pelo telescópio ter se movimentado
devido à rotação e/ou movimento orbital da Terra
(Fonte: Wikipedia).
A aberração
da luz, descoberta por James Bradley em 1728, ocorre
por que a posição de uma estrela no céu é deslocada
por uma quantidade devido ao movimento da Terra perpendicular
à linha de visada.
O deslocamento depende da razão entre a
velocidade orbital da Terra e a velocidade da luz,
e a posição da estrela, já que enquanto a luz atravessa
a distância focal do telescópio, a Terra moveu-se
um pequeno ângulo. Mas o ângulo não
depende da distância focal, já que
tanto o cateto quando a hipotenusa dependem desta, cancelando-se.
É o mesmo efeito que faz a chuva
parecer cair em um ângulo quando estamos caminhando.
aberração=v/c senθ,
onde v é a velocidade do observador, c a velocidade da luz,
e θ o ângulo entre a direção de movimento e o de incidência da luz.
A velocidade orbital da Terra em torno do Sol varia ao longo do ano, já que
sua órbita é elíptica, mas usando-se o valor médio de v=2πUA/ano=30 km/s,
obtém-se a constante
de aberração (efeito máximo),
vorbital/c×cosec 1"=20,5",
e corresponde ao deslocamento ângular máximo
devido ao movimento da Terra.
James Bradley mediu que a posição da estrela γ Draconis
se moveu 20" de dezembro a março de 1725, e apresentou a
teoria da aberração em janeiro de 1729 à Royal Astronomical Society.
Quando o objeto está em quadratura, isto é, a 90° do Sol,
a aberração orbital é nula, pois neste caso o movimento da órbita da Terra em
torno do Sol não está nem se aproximando nem se afastando do objeto.
A aberração diurna, devido à rotação da Terra, depende da
latitude do observador, sendo nula nos polos e máxima no equador,
já que o polo não se move por rotação, e é no máximo 0,32", quando o observador
está no equador, onde a velocidade é maxima, considerando-se a velocidade diurna de v=2πRTerra/dia=0,4651 km/s.
Bradley calculou a velocidade da luz, obtendo c=301 000 km/s, comparando os ângulos de observação de uma estrela com um intervalo de seis meses
e usando a velocidade da órbita da Terra, v, e o ângulo φ entre o telescópio e a direção da órbita da Terra
c2=(c2+v2-2vccosφ)1/2.
Referências: William Marshall Smart,
Textbook on Spherical Astronomy, 6th edition,
1977, Cambridge University Press, p. 67-73; Basilio Santiago,
texto Astrometria.
Sistema de Coordenadas Globais - World Coordinate System (WCS)
O World Coordinate System (WCS) define a relação entre
as coordenadas em píxeis com as coordenadas celestes.
Nos cabeçários das imagens astronômicas, normalmente escritas
no sistema de transporte de imagens flexível -
FITS
(Flexible Image Transport System),
as indicações das coordenadas
para cada pixel da imagem
são escritas em
palavras chaves
(keywords) do WCS.
As coordenadas são globais (world) porque permitem identificar
cada pixel em um sistema multi-dimensional de parâmetros,
sejam as coordenadas celestes em um dado sistema e projeção, sejam
as informações sobre um determinado espectro. Por convenção, no
FITS todos os ângulos devem ser expressos em graus.
Note que tipos de projeções planas diferentes divergem
em coordenadas diferentes. Por exemplo, a projeção tipo Mercartor
diverge nos polos, enquanto as projeções gnômicas divergem no
equador. A projeção TAN, de tangencial, é a projeção da esfera
celeste no plano do detector.
As palavras chaves principais, com valores de exemplo, são:
CTYPE1 = 'RA---TAN' / Tipos de Coordenadas do eixo 1
CTYPE2 = 'DEC--TAN' / Tipos de Coordenadas do eixo 2
CRVAL1 = 1.497921667 / Valor da coordenada 1 no ponto de referência
CRVAL2 = -10.310828889 / Valor da coordenada 2 no ponto de referência
CRPIX1 = 537.75 / Pixel de referência da coordenada 1
CRPIX2 = 0.5 / Pixel de referência da coordenada 2
CD1_1 = -8.56E-05 / Matriz de transformação das coordenadas
CD2_2 = -8.56E-05 / Matriz de transformação das coordenadas
CDELT1 = -8.56E-05 / Valor da derivada da coordenada 1
CDELT2 = -8.56E-05 / Valor da derivada da coordenada 2
Por exemplo, uma imagem atual do SOAR tem no header:
RAPANGL = -90. / Position angle of RA axis (deg)
DECPANGL= 0. / Position angle of DEC axis (deg)
NAXIS = 2 / Number of axes
NAXIS1 = 256 / Axis length
NAXIS2 = 1024 / Axis length
RA = 265.257417 / 17:41:01.7 RA (J2000) pointing (deg)
DEC = -53.74644 / -53:44:47.1 DEC (J2000) pointing (deg)
RADECSYS= 'FK5 ' / Deafult coordinate system
RADECEQ = 'unavail ' / Default equinox
CTYPE1 = 'RA---TNX' / Coordinate type
CTYPE2 = 'DEC--TNX' / Coordinate type
CRVAL1 = 1.497921667 / Coordinate reference value
CRVAL2 = -10.310828889 / Coordinate reference value
CRPIX1 = 537.75 / Coordinate reference pixel
CRPIX2 = 0.5 / Coordinate reference pixel
CD1_1 = -8.56E-05 / Coordinate matrix
CD2_2 = -8.56E-05 / Coordinate matrix
CDELT1 = -8.56E-05
CDELT2 = -8.56E-05
WAT0_001= 'system=image' / Coordinate system
WAT1_001= 'wtype=tnx axtype=ra unavail=system'
WAT2_001= 'wtype=tnx axtype=dec unavail=system'
Uma imagem do VLT:
NAXIS = 2 / # of axes in frame
NAXIS1 = 2048 / # pixels/axis
NAXIS2 = 1034 / # pixels/axis
CRVAL1 = 265.25740 / value of ref pixel
CRPIX1 = 1023.0 / Ref pixel in x-axis
CTYPE1 = 'RA---TAN' / Coordinate system of x-axis
CRVAL2 = -53.74644 / value of ref pixel
CRPIX2 = 119.7 / Ref pixel in y-axis
CTYPE2 = 'DEC--TAN' / Coordinate system of y-axis
RA = 265.257417 / 17:41:01.7 RA (J2000) pointing (deg)
DEC = -53.74644 / -53:44:47.1 DEC (J2000) pointing (deg)
EQUINOX = 2000. / Standard FK5 (years)
RADECSYS= 'FK5 ' / Coordinate reference frame
CD1_1 = -7.000333000E-05 / Translation matrix element.
CD1_2 = -0.000000000E+00 / Translation matrix element.
CD2_1 = -0.000000000E+00 / Translation matrix element.
CD2_2 = 7.000333000E-05 / Translation matrix element.
HIERARCH ESO DET CHIP1 X = 1 / X location in array
HIERARCH ESO DET CHIP1 Y = 2 / Y location in array
HIERARCH ESO DET CHIP1 NX = 4096 / # of pixels along X
HIERARCH ESO DET CHIP1 NY = 2048 / # of pixels along Y
HIERARCH ESO DET CHIP1 PSZX = 15.0 / Size of pixel in X
HIERARCH ESO DET CHIP1 PSZY = 15.0 / Size of pixel in Y
HIERARCH ESO DET CHIP1 XGAP = 30.000000 / Gap between chips along x
HIERARCH ESO DET CHIP1 YGAP = 480.000000 / Gap between chips along y
e do HST:
NAXIS = 2 / Number of axes
NAXIS1 = 4096 / Axis length
NAXIS2 = 2048 / Axis length
/ World Coordinate System and Related Parameters
WCSAXES = 2 / number of World Coordinate System axes
CRPIX1 = 2048.0 / x-coordinate of reference pixel
CRPIX2 = 1024.0 / y-coordinate of reference pixel
CRVAL1 = 265.2912834051976 / first axis value at reference pixel
CRVAL2 = -53.73758959227231 / second axis value at reference pixel
CTYPE1 = 'RA---TAN' / the coordinate type for the first axis
CTYPE2 = 'DEC--TAN' / the coordinate type for the second axis
CD1_1 = -4.918872670979227E-07 / partial of first axis coordinate w.r.t. x
CD1_2 = -1.396917954171559E-05 / partial of first axis coordinate w.r.t. y
CD2_1 = -1.384084948439698E-05 / partial of second axis coordinate w.r.t. x
CD2_2 = -4.648150629445651E-07 / partial of second axis coordinate w.r.t. y
LTV1 = 0.0000000E+00 / offset in X to subsection start
LTV2 = 0.0000000E+00 / offset in Y to subsection start
LTM1_1 = 1.0 / reciprocal of sampling rate in X
LTM2_2 = 1.0 / reciprocal of sampling rate in Y
ORIENTAT= -91.89333046290683 / position angle of image y axis (deg. e of n)
RA_APER = 2.652613785123E+02 / RA of aperture reference position
DEC_APER= -5.373888553233E+01 / Declination of aperture reference position
PA_APER = -92.0979 / Position Angle of reference aperture center (deg)
VAFACTOR= 1.000099395635E+00 / velocity aberration plate scale factor
TELESCOP= 'HST' / telescope used to acquire data
INSTRUME= 'ACS ' / identifier for instrument used to acquire data
EQUINOX = 2000.0 / equinox of celestial coord. system
RA_TARG = 2.652612333333E+02 / right ascension of the target (deg) (J2000)
DEC_TARG= -5.373910833333E+01 / declination of the target (deg) (J2000)
ECL_LONG= 266.753944 / ecliptic longitude of the target (deg) (J2000)
ECL_LAT = -30.353201 / ecliptic latitude of the target (deg) (J2000)
GAL_LONG= 338.133470 / galactic longitude of the target (deg) (J2000)
GAL_LAT = -12.035856 / galactic latitude of the target (deg) (J2000)
/ OTHER COORDINATE SYSTEM INFORMATION
APER_REF= 'JWFC ' / aperture used for reference position
ELON_REF= 266.754033 / ecliptic longitude at reference position (deg)
ELAT_REF= -30.352975 / ecliptic latitude at reference position (deg)
GLON_REF= 338.133712 / galactic longitude at reference position (deg)
GLAT_REF= -12.035819 / galactic latitude at reference position (deg)
O sistema de coordenadas FK5
( Fifth Fundamental catalogue) é anterior ao ICRS
(International Celestial Reference System, de 1998), e foi adotado pela IAU em 1984. O FK5 foi
baseado na posição de 1535 estrelas fundamentais do FK4 e FK3
(Kopff A., 1937, Dritter Fundamentalkatalog des Berliner Astronomischen Jahrbuchs. I. Die Auwers-Sterne für die Epochen 1925 und 1950, Veröff. Astron. Rechen-Institut Berlin-Dahlem, 54, 117;
Kopff A., 1938, Dritter Fundamentalkatalog des Berliner Astronomischen Jahrbuchs. II Die Zusatzsterne für die Epoche 1950, Abh. Preuß. Akad. Wiss. Phys.-math. Kl., 3), com
3117 novas estrelas fundamentais, com magnitudes entre 5,5 e 9,7.
O ICRS2 só foi adotado em 2009. Por definição, o FK5 usa o equinócio de 2000,
juliano, enquanto que o FK4 usa o de 1950, besseliano.
A projeção TAN é um sistema de perspectiva gnomônica zenital [Tales de
Miletus (c.624-547 a.C.], de plano tangente sem distorções. As projeções
zenitais mapeiam toda a esfera em um plano.
A projeção TNX
não é padrão. Ela segue a convenção para uma projeção no plano tangente,
mas adiciona um termo de distorção não linear.
- Calcule as coordenadas de primeira ordem xi e eta
usando a parte linear indicada em CRPIX e pela matriz CD:
xi = CD1_1 * (x - CRPIX1) + CD1_2 * (y - CRPIX2)
eta = CD2_1 * (x - CRPIX1) + CD2_2 * (y - CRPIX2)
- Adicione a parte não linear da projeção usando os coeficientes
dados pelas palavras chaves WAT:
xi' = xi + lngcor (xi, eta)
eta' = eta + latcor (xi, eta)
- Use a transformação padrão da projeção plana tangencial para transformar
xi' e eta' usando os valores de CRVAL como o ponto tangencial para
obter a ascensão reta e a declinação.
As funções não-lineares lngcor(xi,eta) e latcor(xi,eta)
são funcões polinomiais cujos coeficientes são dados nas palavras
chaves WATj_nnn, onde j indica o eixo e nnn os coeficientes.
ICRS
O sistema de referência para as coordenadas adotado pela União Astronômica Internacional é o ICRS (International Celestial Reference System)), com origem no baricentro do sistema solar, com eixos que não monstram rotação em relação a objetos extragaláticos distantes.
O Gaia-CRF3 sistema de referência é baseado em 33 meses de observações do 1 614 173 fontes extragaláticas, comparado com o FK5 que usava estrelas.
O dia juliano modificado, MJD (Modified Julian Date, corresponde a (JD - 2 400 000.5).
A página do
observatório virtual do NOAO
(National Optical Astronomy Observatories) tem uma ferramenta para
analisar e corrigir distorções nestas indicações de coordenadas.
Astrometry.net permite determinar
as coordenadas equatoriais de qualquer imagem, calculando os
triângulos existentes na imagem e comparando-os com os calculados
para todo o céu, desde escalas de vários graus até de alguns minutos
de arco. Não é necessário informar qualquer escala ou posição
(Dustin Lang, David W. Hogg, Keir Mierle, Michael Blanton & Sam Roweis. 2010, Astronomical Journal, 139, 1782.)
Próxima:Aberrações Óticas
Volta: Telescópios
Anterior: Missões Espaciais
 Astronomia e Astrofísica
Astronomia e Astrofísica

©
Modificada em 22 set 2024

{kind=link}